* Press Enter to search or ESC to close


Gansu Jinchuan Group nonferrous metal mine intelligent inspection robot project
Longshou Mine in Jinchuan District, Jinchang City, Gansu Province mainly mines nickel cobalt and copper ores. The total length of the mining area is 6.5km from east to west, including four mining areas. A total of one T3-S rail mounted lifting arm robot and one T5-E indoor rail mounted robot were deployed to conduct systematic inspections of the distribution room and water pump room areas in the mining area, covering a total of 236 inspection points. Realize cross regional, cross scenario, and multi machine intelligent linkage operation and maintenance of mining well related operation facilities.

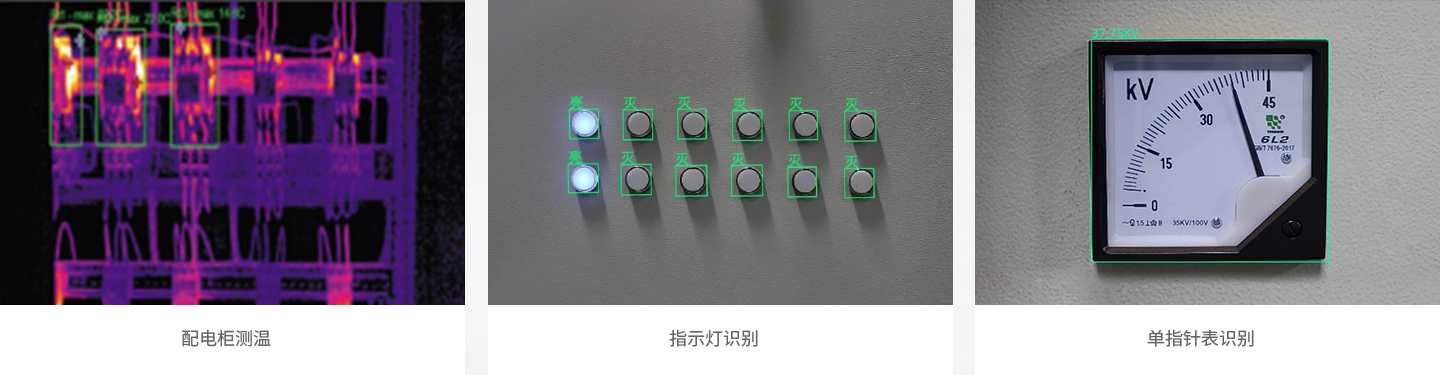
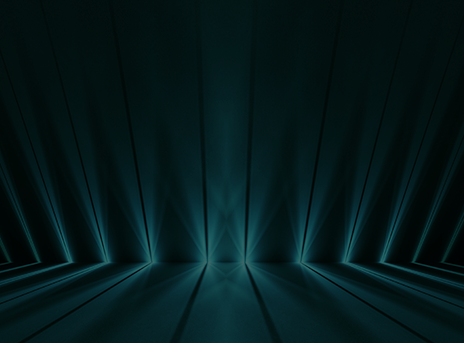
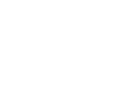
The intelligent inspection system mainly consists of robot body, data system platform, data communication equipment, etc. Capable of autonomous positioning and walking, image acquisition, temperature and environmental gas information. Monitor the operating status of equipment through image recognition technology. Upon discovering any abnormalities, the robot promptly alerted and coordinated with the operation and maintenance personnel to control the on-site equipment to stop running.

Realize unmanned inspection of the power distribution room and water pump room in the vast coal mine area, control the operation status of equipment, timely alert for abnormal states, eliminate safety hazards, complete cross regional, cross scene, and multi machine collaborative operations, save human resources, improve work efficiency, and prevent the occurrence of dangerous accidents. Ensure the smooth operation of the overall production process on the ground in the mining area.
Running Time
50min*8 Times/Day
Inspection Point Location
236 Per Day

Inspection Area
300㎡

微信


视频号


微博


抖音
Electric power, oil and gas, petrochemical, metallurgy: 4001620508-1 Pipe gallery, railway, bridge&tunnel, mine: 4001620508-8
Nanjing Headquarters: No. 23, Andmen Street, Yuhuatai District, Nanjing Beijing subsidiary: Dongyong Chuangyegu Block A, Dongcheng District, Beijing Guangzhou subsidiary: Building 1, Industrial Internet Innovation Center, Baiyun District, Guangzhou Ordos Business Center: No.25 Hangjin North Road, Dongsheng District, Ordos City
Nanjing Production Base: Building C11, Zhongke Industrial Park, Pukou Economic Development District, Nanjing Fuyang Production Base: Building 13, Xiasun Robot Industrial Park, Fuyang City














