* 按 Enter键进行搜索或ESC键关闭


公司动态
发布日期:2025-12-16
核心技术:AEGIS安全执行守护系统
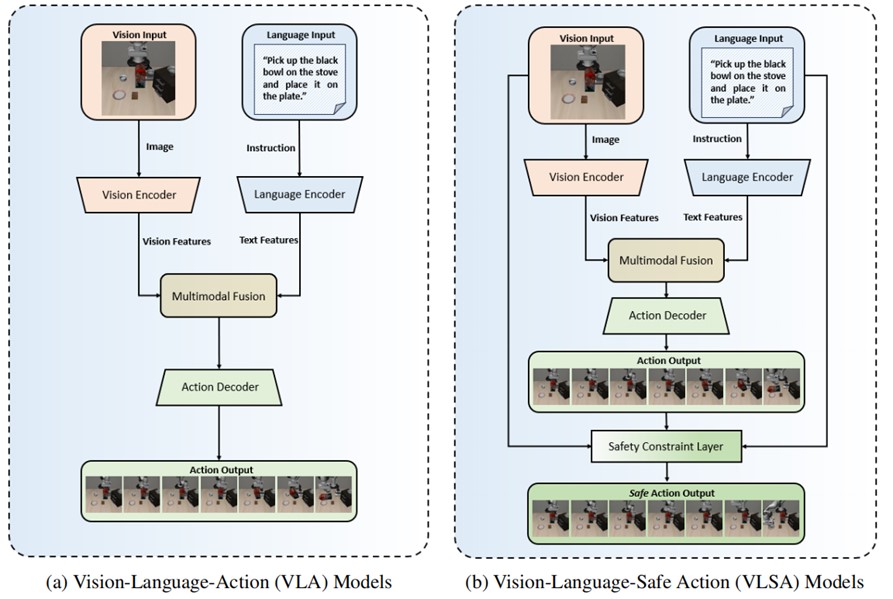
VLSA的核心是AEGIS(Action Execution Guarded by Invariant Safety),它像一位“永远在线却不抢方向盘”的智能副驾驶,在关键时刻精准干预,确保安全无虞:
语义驱动的安全感知
利用VLM理解任务指令(如“将传送带上的电机组件搬运至右侧装配工位”),自动推理出哪些物体是潜在威胁(如正在运转的机械臂、临时堆放的托盘、未固定好的线缆或巡检中的AGV小车);
结合GroundingDINO开放词汇检测器+RGB-D深度图+多视角融合,将文本描述的“危险物”精准定位到3D世界坐标,实现任务对齐的障碍物感知。
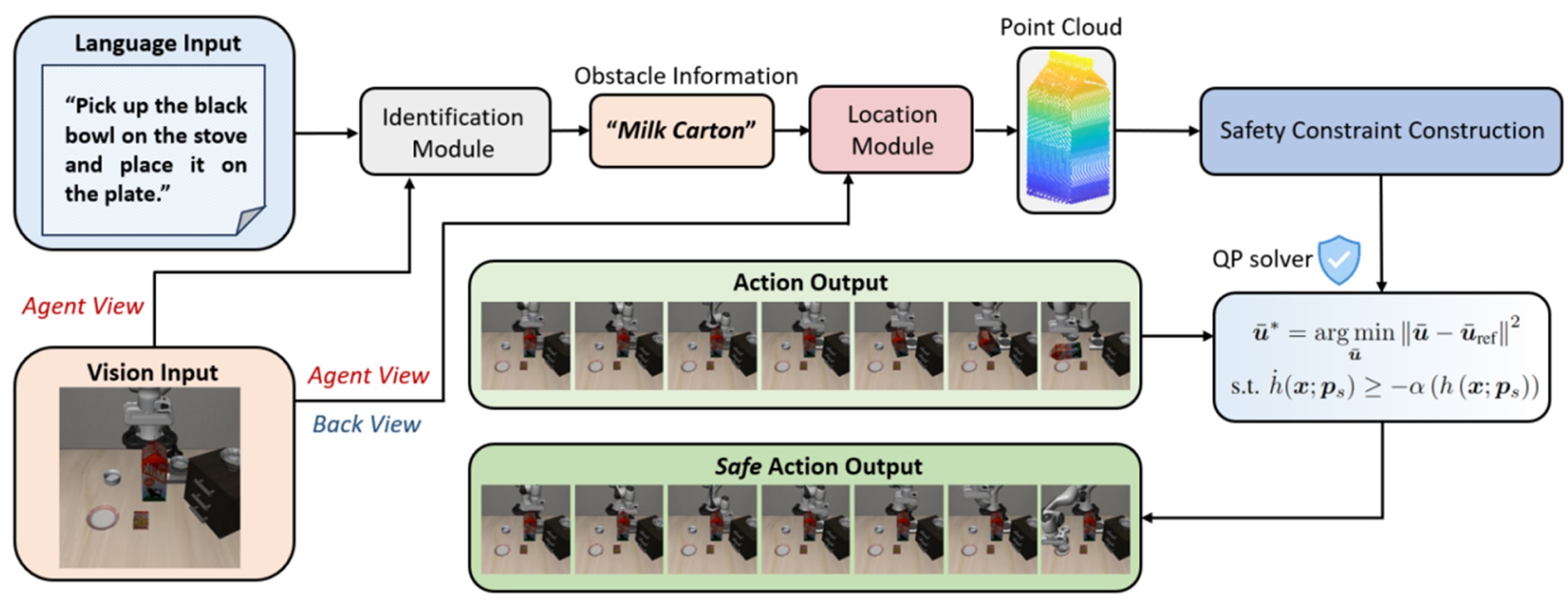
▲AEGIS的流程图
几何约束下的毫秒级安全修正
想象机器人末端和周围的障碍物都不是复杂的形状,而是被简化成一个个“椭球体”。研究人员用了一种聪明的办法:在两个椭球体之间“插”进一个虚拟的平面,系统实时判断两个椭球会不会撞上这个“隔板”。为了让这个方法更灵活、不那么“保守”,还引入了一个“虚拟辅助状态”来动态调整这个平面的方向,让它能更好地贴合实际情况。最终,整个避障策略被转化成一个凸二次规划问题,在平均0.356 毫秒内完成求解,仅占单步控制周期的 1.86%,几乎零开销!
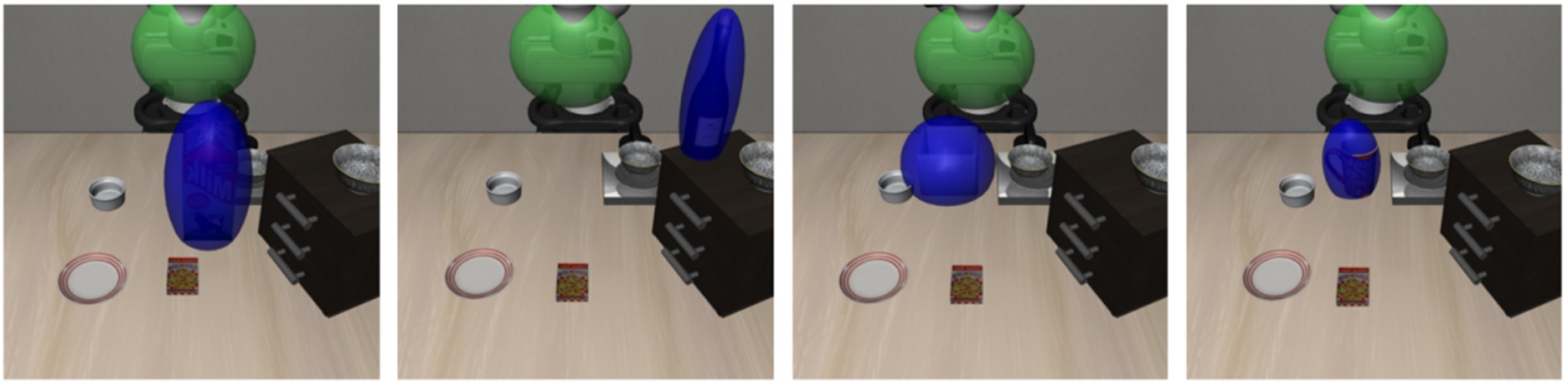
▲机械臂末端与障碍物椭球
只在必要时微调动作,最大程度保留VLA原有的精细操作意图(如端平水杯、轻柔抓取),避免传统避障算法“为了安全牺牲任务”。
严苛验证:SafeLIBERO安全基准发布
为科学评估安全性能,研究团队在主流具身智能基准LIBERO基础上,构建了首个专注于物理安全的测试集--SafeLIBERO:
新增16个任务×2种干扰等级(贴近干扰/路径阻挡);
引入摩卡壶、酒瓶、书本、收纳盒等日常高风险障碍物;
共计1600个随机化测试片段,模拟真实作业场景中的突发碰撞风险。
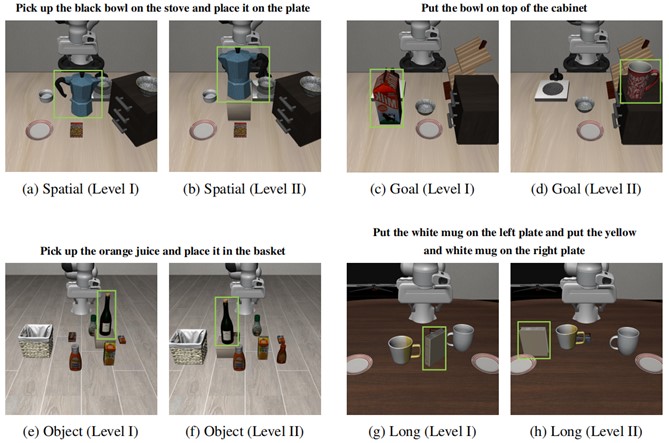
▲SafeLIBERO测试基准总览
实验结果亮眼
与OpenVLA-OFT和pi_0.5等主流VLA模型相比,AEGIS 模块显著提升了系统的安全性与任务执行能力。
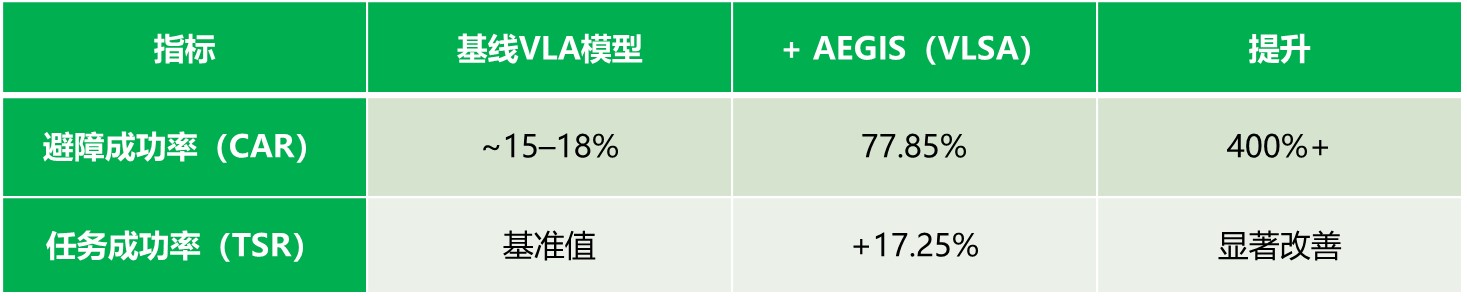
为什么任务成功率反而更高?因为避免了碰撞引发的连锁失败--杯子没打翻、目标没移位、环境未破坏,任务自然更容易完成!

未来,团队将持续拓展 VLSA 在以下方向的能力:
我们相信:真正的智能,必须是负责任的智能。
“守护安全,对抗焦虑"是天创机器人不变的使命。
Ref
论文题目:VLSA: Vision-Language-Action Models with Plug-and-Play Safety Constraint Layer
论文作者:Songqiao Hu, Zeyi Liu, Shuang Liu,Jun Cen,Zihan Meng,Xiao He
论文地址:https://arxiv.org/pdf/2512.11891
项目地址:https://vlsa-aegis.github.io


微信


视频号


微博


抖音
发电电网侧业务:4001620508-1 石油天然气业务:4001620508-2 矿山钢铁业务:4001620508-3 其他行业业务:4001620508-4 生态合作:4001620508-5
南京总部:南京市雨花台区安德门大街23号B栋8层 北京子公司:北京市朝阳区住邦2000商务中心4号楼 广州子公司:广州市白云区产业互联网创新中心A栋
南京生产基地:南京市浦口经开区中科产业园C11栋

咨询微信号













